October 18, 2020
Due to cost and sourcing limitations, I am deferring JRO3 until further notice.
October 1, 2020
Material choices are limited to some degree due to COVID. i.e. I can't source a black ondura roof anymore. I want to figure out if I can source everything before I start this becuse I don't want to start and not be able to finish it. Also, a lack of delivery from big box stores isn't motivating my back to take on so many lifts and moves of all the materials. I do want to do this if possible, I have more than 20 sheets of leftover plywood and a couple of squares of siding that has been sitting for 2 years and I could put it to good use before it goes bad, they plywood anyway. The siding is red. I wanted to enclose the car port for privacy but never did, so all that can be used in this project saving me a ton.
September 29, 2020
I'm contemplating selling the POD and building a small 10x10 roll-off roof observatory in its place. The goal would be automated Lunar, planetary and solar imaging. Having this automated will allow me to use it more getting more value from the equipment. I would consider moving back to the CGE Pro mount with a shortened pier with the 8" SCT on for planetary and lunar with an 85mm refractor setup for solar piggy backed on top. More to follow as this develops, if it develops...
January 9, 2020
I left my ASI1600MM camera with filter wheel on my GTX81 and the ASI294C on the RASA. I have not been using the RASA, only the 81mm refractor for narrowband. It's f/6.6 but much slower than the RASA. Now when the week before and after the new moon I can shoot with my RASA in color and my GTF81 in narrowband witout having to touch anything. I completed generating my imaging statistics for 2019 and posted them here.
December 30, 2019
Installed the Pegasus Astro Ultimate Power Box v2. This forced a re-org of what needed to remain on the RASA and also the move to a newer Intel NUC to retire the Gigabyte BRIX Pro after 3 years. The RASA is much better balanced having been able to reduce a usb hub and a powerpole power distribution block. The new NUC is 1/2 the height of the BRIX and a lot lighter too.
November 12, 2019
I've been working on improving my collection of scripts now called TACS (Tom's Astrophotography Control Software)
Improvements include expanding JRO-Weather to include:
- consolidated readings that consume data from multiple weather stations
- watches clouds and alerts if unsafe conditions occur. i.e. it gets very cloudy and the roof didn't close
- includes color coded confidence with respect to readings
Recent improvements include:
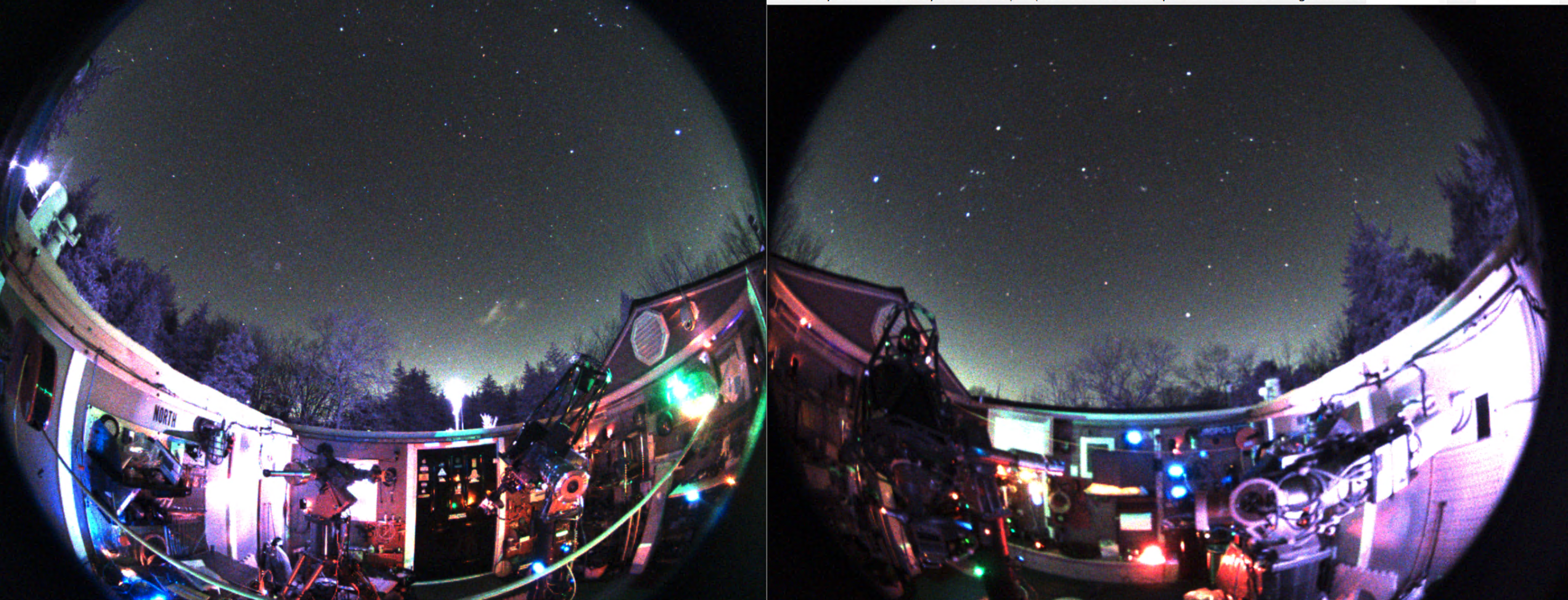
- Second Skycam operational for real time viewing of the sky
- JRO-Pole to take pics of observatories are various times
- Rain.sh to watch rain sensors and alert as appropriate.
- Cams page with realtime updates
- Second pier and mount with 8" SCT
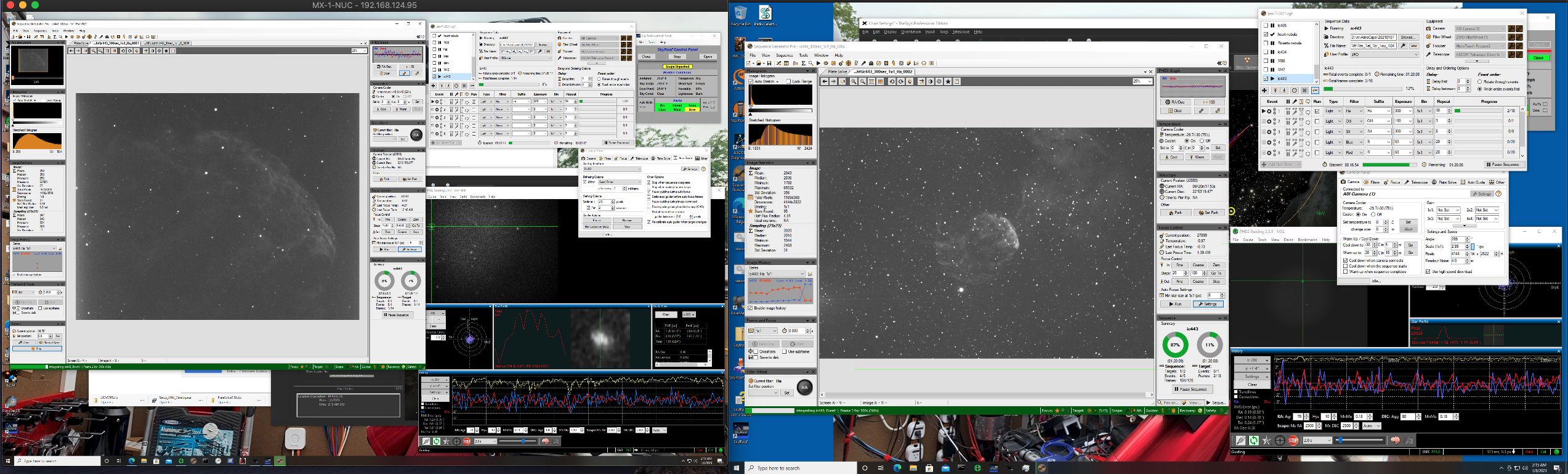
September 24, 2019
I've worked out most of the bugs in release 6, screen caps of me imaging above. Next step is to get piggyback imaging going. Also shown above (bottom right) is my sensor array containing a Hydreon Rain sensor, DIY SkyCam, SQM meter and Hunter Rain sensor.
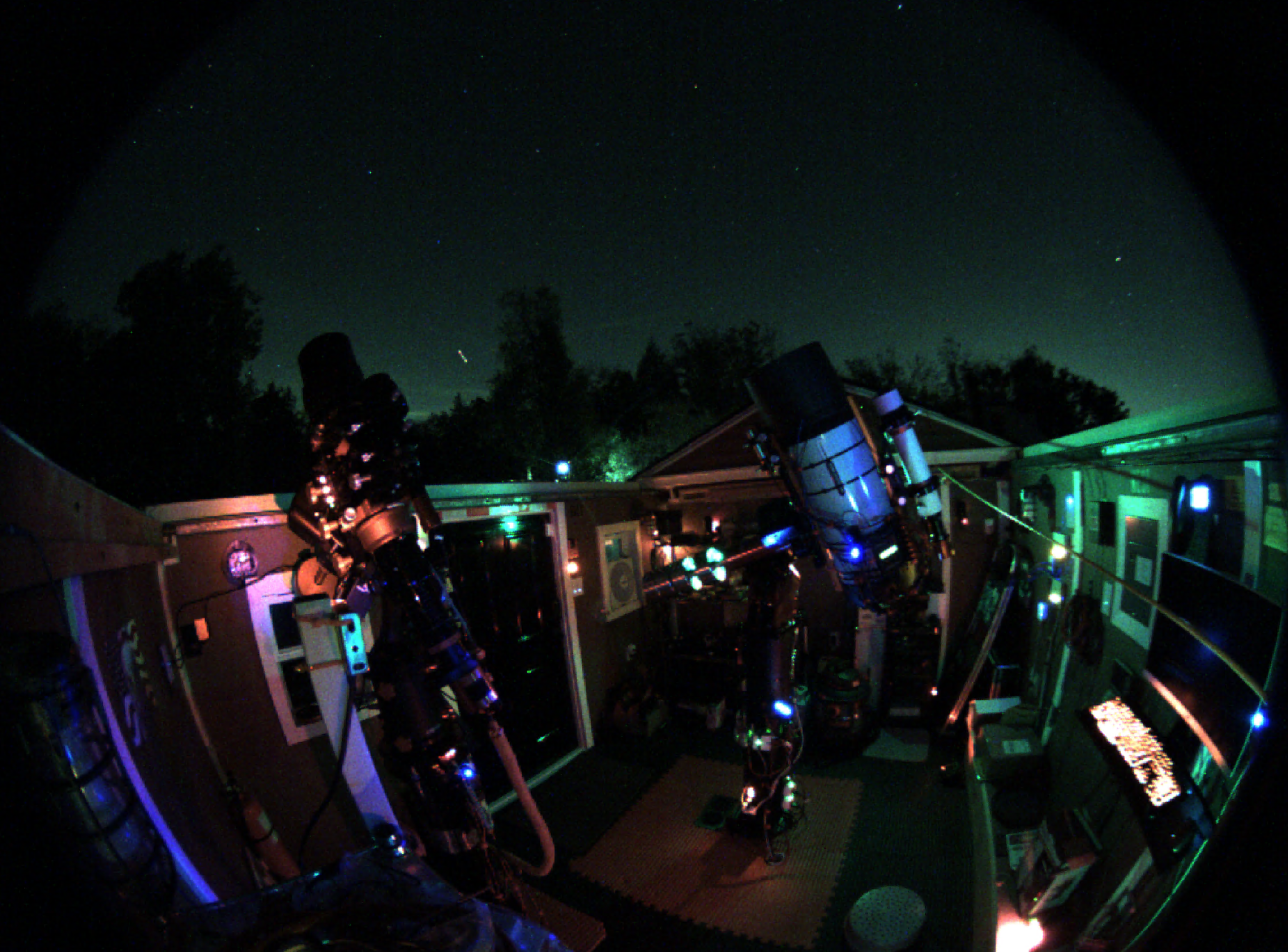
September 17, 2019
Trying out my new v6 build of scripts that control my imaging and observatory automation. Now that I have 2 totally independent mounts working and my Paramount with my RASA has my William Optics GTF81 riding piggyback. I used this to shoot narrowband on my WO when it was around the new moon and my RASA has my ASI 294MC Pro OSC. This past Sunday I flipped them and am only shooting narrowband from my RASA since we are near a full moon. My original goal was to not be moving cameras around but I ended up doing that anyway since the RASA is so much faster than my refractor is. Keeping 2 separate rigs going is one thing, adding another SGP for the piggyback is like dealing with triplets. My latest build addresses some of these new challenges and launches the appropriate scripts based on initial input. I will post action shots tomorrow!
September 15, 2019
Introduced secondary and tertiary rain detection systems. I saw what DeepSkyWest is using and bought the two sensors. A Hydreon RG-11 and a Hunter RainCLIK. Both of these are setup to be closed when dry and open with wet. I used a Raspberry pi and wrote python code to read the 2 GPIO pins the sensors are connected to at some interval and write it to a file with a timestamp. That is always running. On my mac where all my scripts run, I created a rain.sh allows me to configure the interval to read that data file the pi is making and adjust what sensors are in play and what actions I need to take if I detect wetness. I have not tested the actual closing of my roof when it detects rain since I trust my SkyRoof as the primary and I need to ensure that it doesn't also trigger after my SkyRoof which might stop the roof and reverse it which would be really bad!
August 13, 2019
I'm moving to use 2x ZWO ASI 1600MM Pro's, one with narrowband filters and the other with LRGB filters. I will use both of these in parallel with my RASA and WO GTF81 that is piggy-backed on the RASA. I intend to switch them back and forth depending on the moon phase. This will become my default setup for my MX+. Update: the second 1600 w/ loaded 8 FW moved to my 104 on my CGE in the NE corner of the roll-off observatory, see pics under Observatories / JRO SkyShed Latest
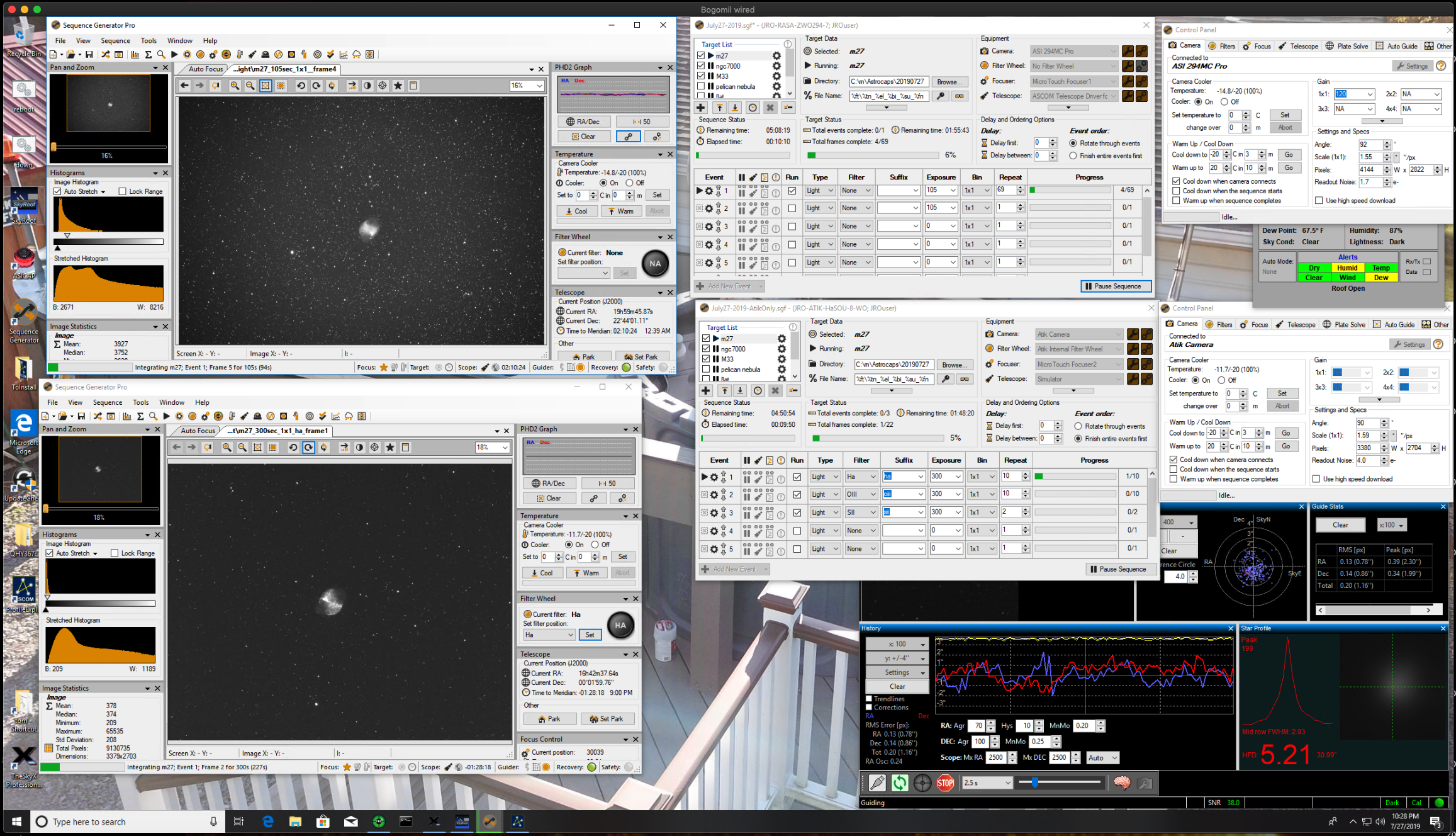
July 28, 2019
I've got my narrowband setup working piggy-back on my RASA, finally. I am able to capture both NB and OSC at the same time with 2 instances of SGPro. Setting up my AVX in the north corner to get better southern views with my 104mm refractor. I'm adding a ZWO ASI1600MM to my collection since I have come to the realization that monochrome yields much more detail than OSC. My ultimate goal will be to be acquiring data from my RASA, WO81 and EON 104 at the same time. Fun to manage, it's like triplets, triple the fun! I could have a 4th scope going in my other observatory, but that is still more manual at this point.
June 25, 2019
My Celestron AVX that fired from the strike is also on its way back to be assessed. Recently my SkyAlert seems to be constantly out of calibration, so that is on its way back to the manufacturer who made me a great offer to fix it. I'm flying blind without the cloud sensor, going old school for the time being. My DIY Skycam is really nice but always needs manual dialing in to darkness and daytime exposure/gain settings. Using the stock ASICap that came with the camera, I can experiment with other software. I don't really mind but it would be nice if it had presets. #LackingGreatSoftware
June 7, 2019
Still recovering from a nearby lightning strike. My Orion AllSkyCam semi-fried in that it works during the day but will not adapt to the night. Thanks to Thomas Jacquin I was able to put one together myself for less than $300 that is actually nicer than the Orion it replaced. It came out nice and I'm happy to show it off.
May 7, 2019
Nothing but rain for over 3 weeks now. Rae daytime sunshine has allowed me to start to do solar imaging.
April 10, 2019
I had decent data acquisition. Automation scripts v5 built and deployed. Startup sequencing automation in place and working. Shutdown automation is copying my data back to another computer inside my house, parking the telescope and closing the roof. Finally automation will shut everything else running off.
March 27, 2019
Paramount MX+ First Light! Locked everything down. Powered everything up. I Iove this mount! I was not able to get a PoleMaster Polar Alignment because i need to spin the pier a little. Next time I'll get it. With 3 weights I couldn't counter-balance the mount with my WO81 piggybacked so that has been removed until I put the additional counterweight on.
March 26, 2019
Time to get acquainted with my MX+, The SkyX Pro
March 4, 2019
JRO SkyShed First Light!
"Automation is what allows me to sleep at night"








Action Shots



